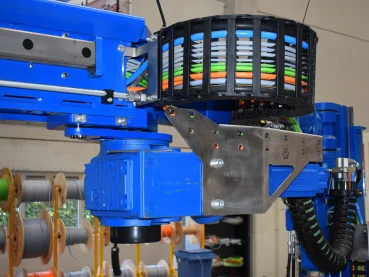
Copal asked SEW-EURODRIVE for its support in calculating the kinematic model. This model describes all movements that have to be performed. The gist of it is that basically four movements have to be made based on a so-called LRRL (linear – rotating – rotating – linear) pattern.
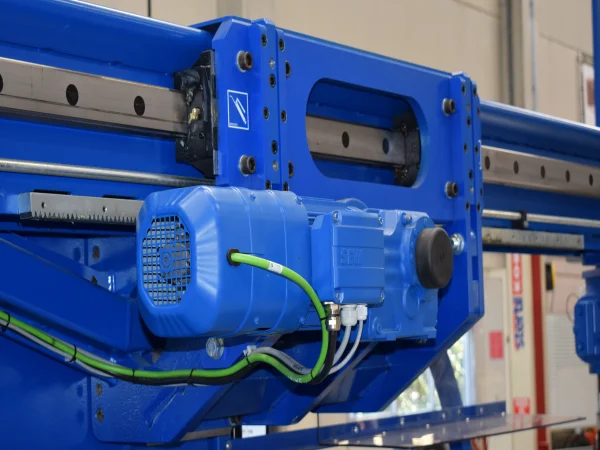
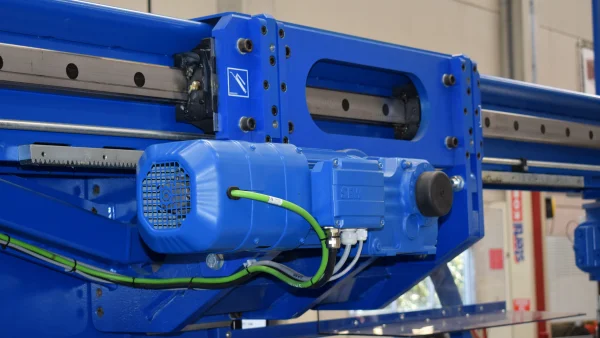
Three of the four movements (X (horizontal) axis, parallel-arm and lifting mast) occur via electrically powered axes. The fourth axis (lifting mast - linear) is carried out hydraulically, but is integrated into the motion model and is steered by the SEW motion controller.
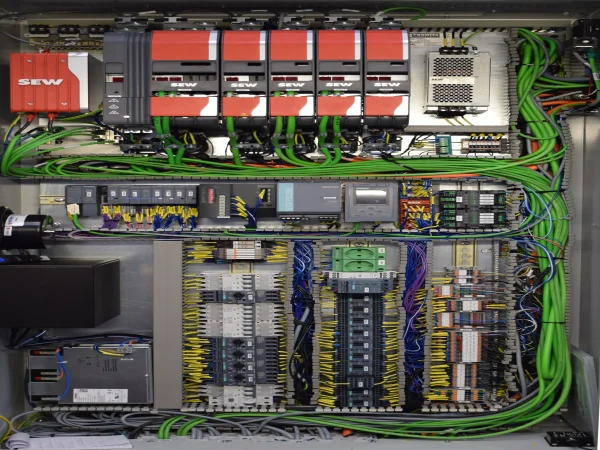
It concerns the MOVI-C® type UHX84-A-R/OMH84, the heart of the control system of the kinematic model that calculates the paths to follow. The kinematic axes are controlled via Ethercat and provided with new (position) information every millisecond. In total there are six axis modules for ten (a)synchronous servo motors. The hydraulic lifting mast cylinders are controlled through SEW Ethercat remote I/O.
The challenge in the machine's design and construction is situated in the limited space to move, not allowing a standard industrial robot as an option. For that reason the modular automation platform MOVI-C® from SEW was given preference.
The MOVI-C® platform consists of engineering software, control technology, centralized and decentralized inverters and drive technology. The MOVI-C® is very compact because of the double-axis modules: One axis module is able to control two motors, so that only one servo inverter is needed.
Because of the compact space one must always take account of the place where the bags are deposited. It is a game between speed and reliability: To choose the fastest path without the elbow of the machine touching the container and damaging itself. The machine’s space to move is determined by the height of the container. The width is standard, but the height is not, because of 'normal' and 'high cube’ containers.
The used gearboxes (amongst others type KAF) are – as far as possible – provided with reduced backlash. This ensures a direct and smooth movement. Moreover asynchronous SEW motors are applied, while other manufacturers have to resort to servo motors. The SEW AC motors have a higher inertia than synchronous motors and can therefore better handle heavier loads (the inertia proportions are more balanced).
Copal Handling Systems and SEW-EURODRIVE want to strengthen their partnership, so that we can continue to count on each other. This includes: Exchange of technical knowledge, think along with each other about solutions and transparency. Continuity is crucial in our branch of sport.
Click on Copal Handling Systems for more information.


 en René Versteeg in front of Copal C2 container unloader")









![[]](https://media.sew-eurodrive.com/sew_master/media/sew_eurodrive/produkte/umrichtertechnik/dezentrale_installation_umrichter/decentralized-installation-inverter-235x177-2x.webp)
![[]](https://media.sew-eurodrive.com/sew_master/media/sew_eurodrive/produkte/getriebe/standardgetriebe/gear-units-235x177-2x.webp)
![[]](https://media.sew-eurodrive.com/sew_master/media/sew_eurodrive/produkte/servo_antriebstechnik/servogetriebemotoren_2/precision-servo-gearmotor-zn-235x177-2x.png)
